HugWBC:
A Unified and General Humanoid Whole-Body
Controller
for Versatile Locomotion
* Equal contribution ^ Project Lead

RSS 2025
Music Cover: Daddy Yankee - Dura
Whole-Body Boxing
Outdoor
Indoor
Gait Switching
Walking, Jumping, Standing + Various Commands
Hopping Feet
Robust Locomotion To Any Upper-Body Intervention
Loco-Manipulation (Carry Box)
Noise
Hello & Goodbye
Cross Arms
Dynamic Behaviors in Various Gaits
Hopping in All Directions
Hopping; Height: High -> Low
Jumping Forward; Velocity: Low -> High
Jumping Sideways
Bendover Walking (Running) -> Squat Walking
Normal Jumping -> Squat Jumping
Walking; Freq: High -> Low; Foot Height: Low -> High
Walking (Running) -> Jumping
Outdoor Gait Combination/Switch
Campus
Commercial District
With Kids on Lawn
With Kids on Lawn
Walk & Boxing on Lawn
Walk & Jump on Lawn
Abstract
Locomotion is a fundamental skill for humanoid robots. However, most existing works made locomotion a single, tedious, unextendable, and passive movement. This limits the kinematic capabilities of humanoid robots. In contrast, humans possess versatile athletic abilities—running, jumping, hopping, and finely adjusting gait parameters such as frequency, and foot height. In this paper, we investigate solutions to bring such versatility into humanoid locomotion and thereby propose HUGWBC: a unified and general humanoid whole-body controller for fine-grained locomotion. By designing a general command space in the aspect of tasks and behaviors, along with advanced techniques like symmetrical loss and intervention training for learning a whole-body humanoid controlling policy in simulation, HUGWBC enables real-world humanoid robots to produce various natural gaits, including walking (running), jumping, standing, and hopping, with customizable parameters such as frequency, foot swing height, further combined with different body height, waist rotation, and body pitch, all in one single policy. Beyond locomotion, HUGWBC also supports real-time interventions from external upper-body controllers like teleoperation, enabling loco-manipulation while maintaining precise control under any locomotive behavior. Our experiments validate the high tracking accuracy and robustness of HUGWBC with/without upper-body intervention for all commands, and we further provide an in-depth analysis of how the various commands affect humanoid movement and offer insights into the relationships between these commands. To our knowledge, HUGWBC is the first humanoid whole-body controller that supports such fine-grained locomotion behaviors with high robustness and flexibility.
Framework
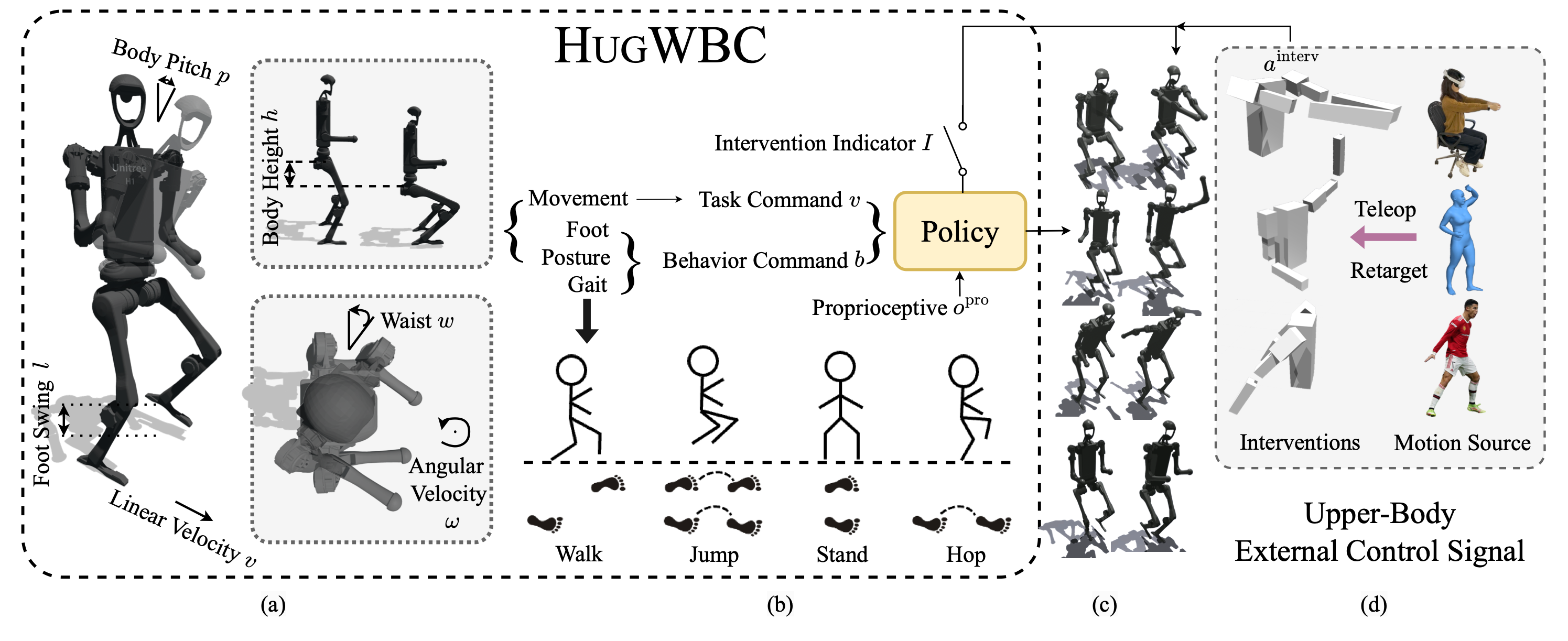
a): Visualization of parts of commands. The side view (left) highlights the linear velocity, foot swing height, and body pitch commands.
The top-right view shows the angular velocity and waist yaw commands, and the bottom-right view shows the body height command.
b): Policy inputs/outputs. The policy is provided with commands, proprioceptive observations, the intervention indicator, and outputs all joints of the robots.
c): Illustrations of four gaits on the robot without/with external intervention. By default, the policy controls both the upper-body and the lower-body joints.
d): External control support. Feasible external control signals can be seamlessly integrated into the robot's behavior without hurting locomotion performance.
Acknowledgments
We thank Jingxiao Chen, Xinyao Li, Jiahang Cao and Xin Liu for their kind support of upper body control, motion generation, and demo recording. We thank Unitree for their help on the hardware.
BibTeX
@inproceedings{xue2025unified,
title={A Unified and General Humanoid Whole-Body Controller for Fine-Grained Locomotion},
author={Xue, Yufei and Dong, Wentao and Liu, Minghuan and Zhang, Weinan and Pang, Jiangmiao},
booktitle={Robotics: Science and Systems (RSS)},
year={2025},
}